グラフ埋め込み#
クイズ#
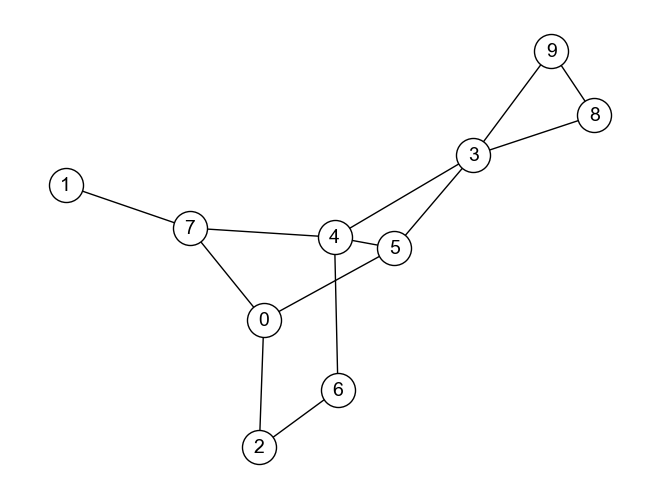
Q1: ランダムウォーク#
以下のグラフ\(G_{maze}\)において,任意のノードからスタートし,ランダムウォークを\(L\)回したときの経路を得る関数get_random_walk_pathを定義しなさい.
関数get_random_walk_pathの引数はグラフG,出発ノードnode_from,経路の長さ(ランダムウォークの回数)lengthとし,返り値は[0, 4, ..., 3]のようなノードのリストとすること.
なお,このクイズではNetworkxのgenerate_random_paths関数は用いないこと.
※ ヒント: あるノードに隣接するノードのリストを得るには,Networkxのグラフオブジェクトのneighborsメソッドを用いればよい.
またリストからランダムに要素を取得するにはrandomパッケージのchoiceメソッドを用いればよい.
import random
# Write your code
def get_random_walk_path(G, node_from, length):
''' node_from: グラフG上でランダムウォークを開始するノード
length: ランダムウォークして得る経路の長さ
'''
# 生成する経路を保存するリスト
path = []
# 始点ノードを追加
path.append(node_from)
for i in range(length):
last_node = path[-1] # 最後に訪問したノード
# 次に移動するノードを隣接ノードから選択
adjacent_nodes = list(G.neighbors(last_node))
next_node = random.choice(adjacent_nodes)
# 経路に追加
path.append(next_node)
return path
# グラフを定義
G_maze = nx.sedgewick_maze_graph()
# 定義した関数を用いて経路を得る
path = get_random_walk_path(G_maze, node_from=1, length=5)
path
[1, 7, 0, 2, 0, 5]
Q2: node2vecのためのランダムウォーク#
クイズQ1で定義したget_random_walk_path関数を改良し,node2vecアルゴリズムに従うランダムウォーク経路を生成する関数get_random_walk_path_for_n2vを定義しなさい.
なお,関数get_random_walk_path_for_n2vの引数として以下を設定しなさい.
G: グラフ
node_from: 経路の始点となるノード
length: 経路の長さ
p: 再訪性パラメータ(float型)
q: In-outパラメータ(float型)
※ ヒント: 指定した重み(確率分布)に従ってリストから要素を取得するには,randomパッケージのchoices関数を用いる(参考).
import random
# Write your code
def get_random_walk_path_for_n2v(G, node_from, length, p: float=1, q: float=1):
''' node_from: グラフG上でランダムウォークを開始するノード
length: ランダムウォークして得る経路の長さ
'''
# 生成する経路を保存するリスト
path = []
# 始点ノードを追加
path.append(node_from)
for i in range(length):
node_v = path[-1] # 最後に訪問したノード
if len(path) >= 2:
node_t = path[-2] # node_vの前に訪問したノード
neighbors_v = list(G.neighbors(node_v))
neighbors_t = list(G.neighbors(node_t))
# 次に移動するノードを選択するための確率分布を定義
weights = []
for neighbor_v in neighbors_v:
if neighbor_v == node_t:
weights.append(1 / p)
else:
if neighbor_v in neighbors_t:
weights.append(1.0)
else:
weights.append(1 / q)
# 次に移動するノードを確率分布に従い選択
next_node = random.choices(neighbors_v, weights)[0]
# 経路に追加
path.append(next_node)
else:
# 次に移動するノードを隣接ノードから選択
adjacent_nodes = list(G.neighbors(node_v))
next_node = random.choice(adjacent_nodes)
# 経路に追加
path.append(next_node)
return path
# グラフを定義
G_maze = nx.sedgewick_maze_graph()
# 定義した関数を用いて経路を得る
path = get_random_walk_path_for_n2v(G_maze, node_from=1, length=4, p=1, q=0.01)
path
[1, 7, 0, 5, 3]
Q3: 論文ジャンルの分類(1/2) - 埋め込みベクトルの獲得#
Coraは論文公開サイトarXivで公開されている機械学習分野の論文の一部を抽出したデータセットである. データセットには,論文の引用関係(どの論文がどの論文を引用したか)や論文のキーワード情報に加えて,各論文の分野カテゴリを示すラベル情報が含まれている. 分野カテゴリラベルは0から6までの整数値のいずれかをとり,各数値に対応する分野は以下の通りである:
Case based
Genetic algorithm
Neural network
Probabilistic method
Reinforcement learning
Rule learning
Theory
from torch_geometric.datasets import Planetoid
from torch_geometric.utils.convert import to_networkx
# paper_datasetはPyGで扱えるグラフのデータ構造
paper_dataset = Planetoid(root="tmp", name="cora", split='full')
# NetworkXのグラフデータ構造に変換
G_paper = to_networkx(paper_dataset._data)
# 表示位置を調整して可視化
pos = nx.forceatlas2_layout(G_paper, seed=1234)
nx.draw(G_paper, pos, node_size=5, width=0.1,
alpha=0.6, arrowsize=1, with_labels=False)

分野カテゴリが未知の論文について,そのカテゴリを推定する分類器を機械学習で構築したいとしよう. 第1ステップとして,論文の引用関係から引用関係グラフを構築し,グラフ構造とnode2vecを用いて各論文の埋め込みベクトルを得たい. 以下のPythonコードを追記,修正して,論文の埋め込みベクトルを獲得しなさい.
なお,node2vecのパラメータは以下とする:
embedding_dim: 64walks_per_node: 10walk_length: 10context_size: 5pおよびq: 任意epoch_num(学習ループ回数): 20
from torch_geometric.datasets import Planetoid
import torch
import torch_geometric
from torch_geometric.nn import Node2Vec
# paper_datasetはPyGで扱えるグラフのデータ構造
paper_dataset = Planetoid(root="tmp", name="cora", split='full')
# node2vecの設定
model = Node2Vec(
paper_dataset.edge_index, # 埋め込み対象となるグラフのエッジ情報
embedding_dim=64, # 埋め込みベクトルの次元数
walks_per_node=10, # ノードひとつにつきランダムウォークで生成するノード系列の数
walk_length=10, # ノード系列の長さ
context_size=5, # word2vecを実行する際の,文脈の大きさ(周囲何ノードを対象とするか)
p=2, # pパラメータ
q=0.5, # qパラメータ
)
# -----------------
# 学習フェーズ
# -----------------
epoch_num = 20
# 微分最適化アルゴリズム
optimizer = torch.optim.Adam(model.parameters(), lr=0.01)
# 学習データの読み込み方法
loader = model.loader(batch_size=32, shuffle=True, num_workers=0)
# 学習
for epoch in range(epoch_num):
model.train()
total_loss = 0
for pos_rw, neg_rw in loader:
optimizer.zero_grad()
loss = model.loss(pos_rw, neg_rw) # 誤差の計算
loss.backward() # 誤差逆伝播
optimizer.step() # パラメータ更新
total_loss += loss.item()
train_loss = total_loss / len(loader)
if epoch % 5 == 0:
print(f'Epoch: {epoch}, Train-loss: {train_loss:.4f}')
# -----------
# 埋め込みの取得
# -----------
# モデルを推論モードに切り替え
model.eval()
# 行列を得る
X_n2v = model().detach().numpy()
Epoch: 0, Train-loss: 4.7598
Epoch: 5, Train-loss: 1.3170
Epoch: 10, Train-loss: 0.9027
Epoch: 15, Train-loss: 0.8251
Q4: 論文ジャンルの分類(2/2) - 分類器の構築#
Q3で得たノードの埋め込みベクトルとcoraデータセットの論文カテゴリラベルを用いて,論文のカテゴリを推定する分類器を構築したい. ベクトルデータを入力とする機械学習手法を用いて分類器を構築し,5分割交差検証を用いて構築した分類器のマクロ適合率,マクロ再現率,マクロF1値を算出しなさい. なお,用いる機械学習手法は自由とする.
from sklearn.svm import SVC
from sklearn.model_selection import KFold, StratifiedKFold
from sklearn.metrics import precision_score, recall_score, f1_score
# キーワード情報を取り出す
#X_keyword = paper_dataset.x.numpy()
# PCAでキーワードベクトルを圧縮
#from sklearn.decomposition import PCA
#pca = PCA(n_components=64)
#X_pca = pca.fit_transform(X_keyword)
# 分野カテゴリラベルを取り出す
y = paper_dataset.y
# 層別化
kfold = StratifiedKFold(n_splits=5, shuffle=True)
# 交差検証の結果を格納するリスト
precisions = []
recalls = []
f1s = []
# 交差検証
for train_idx, test_idx in kfold.split(X_n2v, y):
# train_idx, test_idxには,データフレーム中の何番目のデータを用いるかのリストが入っている.
X_train = X_n2v[train_idx]
X_test = X_n2v[test_idx]
y_train = y[train_idx]
y_test = y[test_idx]
# 学習.今回はサポートベクターマシンを用いる(with RBFカーネル)
svm_model = SVC(kernel='rbf')
svm_model.fit(X_train, y_train)
# 推論
y_predicted = svm_model.predict(X_test)
# 評価スコアの計算
precision = precision_score(y_test, y_predicted, average='macro')
recall = recall_score(y_test, y_predicted, average='macro')
f1 = f1_score(y_test, y_predicted, average='macro')
precisions.append(precision)
recalls.append(recall)
f1s.append(f1)
# 結果を集約
print(f'Mean of macro precision: {np.mean(precisions)}')
print(f'Mean of macro recall: {np.mean(recalls)}')
print(f'Mean of macro F1 score: {np.mean(f1s)}')
Mean of macro precision: 0.8378970987884765
Mean of macro recall: 0.7933183806356368
Mean of macro F1 score: 0.8111589442418905